just a few short hours on my improvements to this horizontal/perpendicular to the horizon vision scanning system.
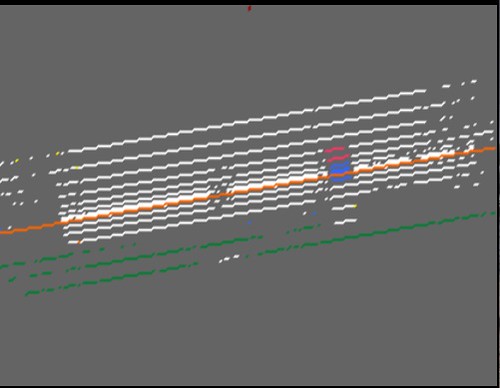
The photo is a first attempt at a post scanning algorithm that starts at the horizon line and then goes upwards and downwards in decreasing frequency scanning parallel to the horizon.
Next up is to give a run structure another go that stores important colors.
The added bonuses of this system are:
1) it fixes the disproportions that show up when you move the head around, thus making the scan lines perpendicular to the ground
2) it scans a lot fewer pixels, hence making the whole vision system much faster
I’m going to see if I can’t get more out of this system this week as I’ll have little to do other than work on vision while the Lab is under construction.