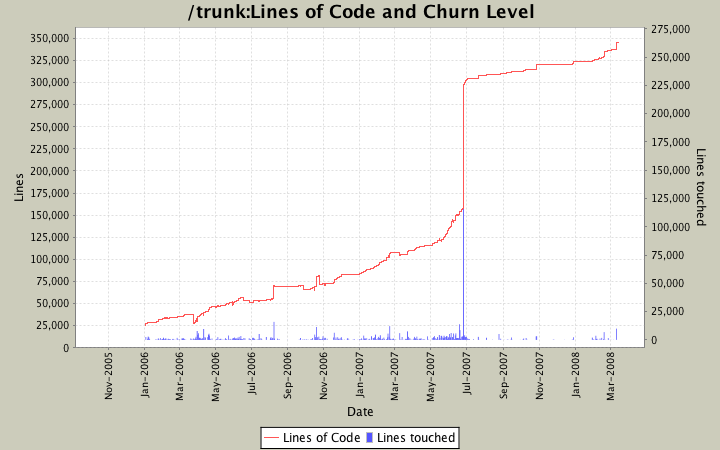
What is SLOC? It means Source Lines of Code–and we’ve generated a lot of them. So we ran this program called sloccount on our bulky our entirely fresh, brand-spanking new code base as of last fall. It came up with some interesting numbers:
Total Physical Source Lines of Code (SLOC) = 33,716 –Ed.: 10,000 of this is Python 2.3 source code (and not ours)
Development Effort Estimate, Person-Years (Person-Months) = 8.04 (96.48)
Schedule Estimate, Years (Months) = 1.18 (14.19)
Estimated Average Number of Developers (Effort/Schedule) = 6.80
Total Estimated Cost to Develop = $ 1,086,099 (average salary = $56,286/year).
I can only conclude that I have been vastly underpaid over the last year.
Here’s how it broke down in terms of languages:
cpp:Â Â Â Â Â Â Â Â Â 16838 (49.94%)
python:Â Â Â Â Â Â 10995 (32.61%)
ansic:Â Â Â Â Â Â Â Â 5421 (16.08%)
sh:Â Â Â Â Â Â Â Â Â Â Â Â 462 (1.37%)
So overall we’ve done quite a lot of work. Roll, nBites!
*generated using David A. Wheeler’s ‘SLOCCount’.*