AustinVilla is now undefeated after two games after beating CMU in the most recent pool play game. Footage of that game will be up later tonight, along with the rest of the Bowdoin videos.
TT-UT AustinVilla 3 – CMU 0
2 Replies
AustinVilla is now undefeated after two games after beating CMU in the most recent pool play game. Footage of that game will be up later tonight, along with the rest of the Bowdoin videos.
Nailbiting game just finished. CMU scored on us in the second half, and then kicked the ball into their own goal, giving us the tie. A few of our robots could not see the ball due to some problem with the camera; we will try to fix this before our next game.
The 10 am match between AustinVill and the UPennalizers concluded earlier this morning. Video of the match will be up later tonight (shot in hi-def, to boot!)
Currently it’s half time in the Bowdoin-CMU match, tied at 0-0. We have had our robot’s head pop off twice in the first half after taking some hard spills… video of that will definitely be up later as well.

Farmer Wu Yulu drives his rickshaw pulled by a his self-made walking robot near his home in a village at the outskirts of Beijing January 8, 2009. This robot is the latest and largest development of hobby inventor Wu, who started to build robots in 1986, made of wire, metal, screws and nails found in rubbish sites. (REUTERS/Reinhard Krause) #
Some great pictures of different robots from around the world are available here.
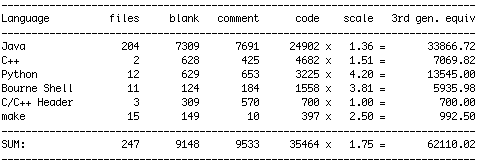
For those of you interested in how sprawling this project has become:
TOOL branch statistics:
man branch statistics:
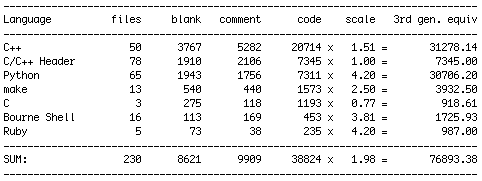
That’s a lot of lines of code.

Dunkin Donuts *really* needs to sponsor us.

Roll
I found a bunch of pictures from US Open ’08 and RoboCup ’08 that have not been uploaded. Here’s the best one I’ve seen so far. More to come.

Video of China

Aldeberan released a new promotional video for its updated model NAO robot. Notice the second camera! Very slick entertaining video. We’re very excited about the possibilities of the robot.
I visited the Boston Museum of Science over fall break and saw their exhibit on robots and artificial intelligence. Supposedly they had an AIBO but I couldn’t find it. They did however have a robot guide that talked about the AIBO. Following is a picture and the transcript
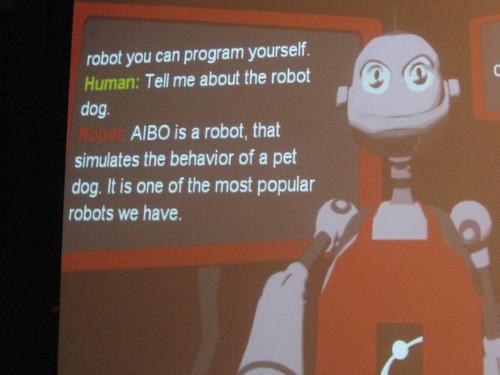
Here is the transcript of the robot guide’s description of the AIBO
Human: Tell me about the robot dog.
Robot: AIBO is a robot, that simulates the behavior of a pet dog. It is one of the most popular robots we have.
Human: OK.
Robot: So, like a real dog, he is able to see things, and also, he responds to a few spoken commands.
Human: Really? How does he do that?
Robot: Well, AIBO has a color digital camera, mounted in his head. The video from this camera is analyzed to identify things he sees.
Human: OK.
Robot: He also has an infra red distance sensor, to detect obstacles and to avoid running into them.
Human: I see. What about spoken commands?
Robot: He has a pair of microphones on each side of his head. This audio input aids in locating the source of a sound.
Human: Interesting. What else can AIBO do?
Robot: AIBO can respond to touch too. If you path him, he will act in an affectionate manner.
Human: (How does he do that?)
Robot: Well, AIBO has touch sensitive pads, on top of his back on his head, chin, and on each paw. When he is touched in these areas, he receives data through these sensors that will make him react with appropriate feedback
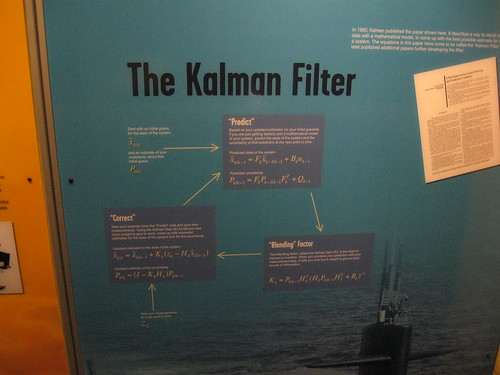
A plate about the Kalman filter, which we use in localization:
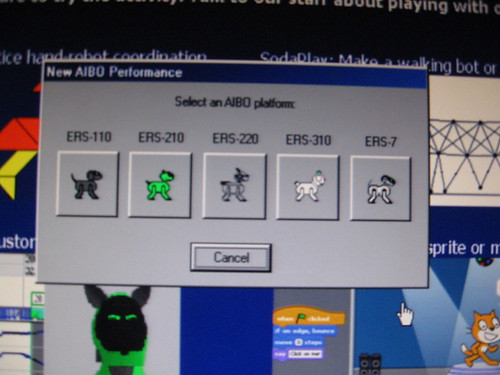
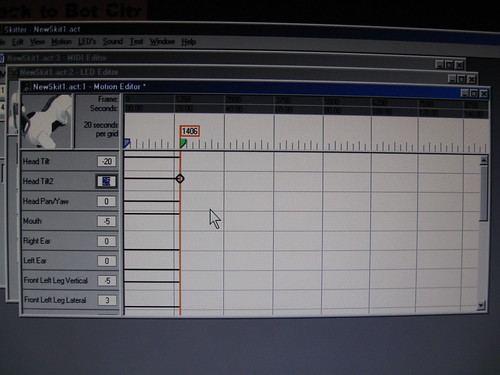
Motion creator for AIBO:
A robot similar to the Roomba:

R2D2 and pals

See all the relevant pictures here
