Video: NTU Pal
Leave a reply
We are proud to be hosting the US OPEN for the Standard Platform League this year. The event will be held in Bowdoin’s brand-new Watson hockey arena on May 2nd and 3rd. Currently we expect attendance from all the US Teams: CMU, UPenn, UT Austin and of course the Northern Bites.
We are excited to be the first non-hockey or athletics related event host in this venue. The venue has great lighting, a superb sound system, and also the built-in capability to do webcasting. We expect the venue to be open to the public from 9 to 5 both Saturday and Sunday. The finals will be held Sunday afternoon.

Interior of Watson Arena
This is my attempt to use HTML tables. Not the prettiest in the world.
Aibo results
| Opponent | Final score |
|---|---|
| Cerberus | 6-0 |
| TJ Ark | 3-0 |
| sharPKUngfu | 9-0 |
| UT Austin Villa | 4-2 |
| TecRams | 10-0 |
| GermanTeam | 0-2 in penalty kicks |
| UT Austin Villa | 3-1 |
See the whole Aibo League’s results here
The Nao results can be found here
My battery is about to die but figured someone might want to see a picture from China



On the bus to Suzhou from the Shanghai airport, Jack and I started writing what is the fastest behavior ever written – it was created today (Sunday) and will play soccer by Wednesday (knock on wood). Even in 2006, our behavioral code was started at least 2 weeks before competition. It will certainly be an adventure!
Our trip to get here went about as smooth as can be expected. No one got any sleep before our 3:00am meet up time in the Lab, and the 45-min taxi ride in a Lincoln Navigator turned out not be as cramped as we expected, considering the enormous size of our robot cases.
In Portland, Jack and I managed to get away with paying only 80 dollars apiece for our overweight and oversize luggage that could have cost us upto $300 per leg. What a steal! (Mike and Todd had to pay $360, and they’re luggage didn’t even make it to Shanghai on the right flight!) Our 1hr layover in Atlanta turned out to be plently long enough to make it from C55 (where our flight arrived) all the way to the E concourse to catch our 777 to shanghai. Bowdoin RoboCup represented in row 50, while the rest of the plane was pretty empty. The 15hr flight turned out to be just as long as you’d expect a 15 hour flight to be – long enough to take several hour long naps, watch a movie or two, and read some of my book, and still have time to watch the plane inch slowly across the map view in the headrest in front of me.
Once we got to Shanghai, I tried to take money from an ATM, but it said my Bank refused the payment. Instead I found a pretty decent exchange rate right next to the luggage pickup where you pay a flat 59 RMB commission on the exchange – the rate was something like 6.75 RMB/dollar. Once we got our luggage, we were met by some local volunteers who helped us sort out our ATA Carnet, and get through customs. Mainly we had to wait a long time for them to process CMUs Carnet – they never even looked through our luggage, and approved our paperwork quickly. As should be expected with technology, neither of the two cellphones I brought worked when I turned them on. The Bowdoin one refused to acquire any service – maybe it doesn’t work on the 900Mhz band? The other one I managed to borrow from Dave probably needs to get some minutes charged into it – it says Emergency Use Only – at least it gets service!
Exiting from Customs in Terminal 1, we met the rest of the group, who had already been informed by another volunteer that we had another team member waiting in Terminal 2. One of them even helped guide us to the other terminal, which was a relief. In Terminal 2, we met up with Todd and Mike from UT Austin, whose robot’s unfortunately hadn’t made it on the same flight. After grabbing Tucker and Henry, we were again guided to the tour bus, which took about 3 hours or so, and finally dropped off at our hotel. A deluge of volunteers processed all the RoboCuppers on the Bus, and got us meal tickets and room keys. Tomorrow we will start breakfast at 6am, in time to be at the Venue for the 7am opening.
Sorry for the lack of updates recently; all of us have been hard at work preparing both the Aibos and Naos for competition in China. The Naos present extremely interesting possibilities for the future, not the least of which is their improved camera.
Here is a picture from the Aibo camera:

Here is a picture from the Nao camera:
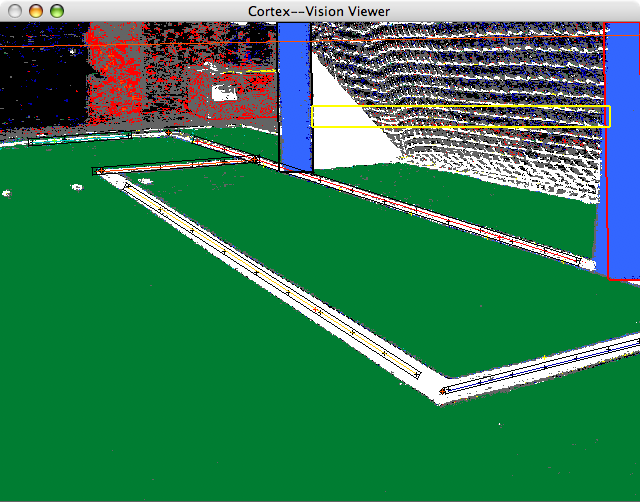
Not only is the resolution much improved (640×480 pixels versus 208×168) but also the vantage point allows the Nao to see a lot more of the field at any given time than the Aibo ever could.
There is still a lot of work left to do before competition starts, but we’re ready for it.
Yesterday we scrimmaged the German Team in our lab. The idea is very similar to how we competed at the German Open in April. We sent the German Team a copy of our color table for the lab, and some code that loaded the binary into memory, and Max converted it to the german team’s format.
Our play was comparable to the German Team’s, and we finished the first half leading 1-0 after a lucky shot on goal. The second half ended prematurely after drained batteries and bugs on both sides made play deteriorate, but not until after both teams scored a goal, leaving the final score 2-1. Our major problems came from a bug which keeps the chaser in the grabbing position instead of kicking, resulting in a ball holding penalty, as well as a short episode of ball fright induced by a DEBUG_CHASER switch turned on at half. The German Team’s only issue was an unidentified problem which resulted in the robot ceasing to play soccer and simply swaying back and forth in the middle of the second half.
Unfortunately we were only able to scrimmage 4. v 4. since we our robots are deteriorating quickly. Currently Sam and Pippin are in the shop, and Mike’s leg is about to give out. Even though development on the Aibo is generally straightforward, it is clear that only a few teams (if any!) will be able to muster robots to play again next year if the Aibos are brought back for another year.
Gostai, Cyberotics and Aldebaran have announced Robostadium, which is an online simmulation league based on the rules for the Nao SPL . The league is open to anyone, and the winner gets a free Nao and a software pack with URBI and Webots PRO. I think this will be really cool, since it could draw a ton of outside interest to our league.
I’d heard about this idea a while ago, and I was worried that only the established RoboCup teams would have a fighting chance, since walking is so difficult, but now I think there won’t be any or at least very few RoboCup teams participating:
The competitors will have to program a team of 4 Nao robots using the URBI middleware and the Java programming language.
Since most teams have considerable code infrastructure of their own in laguages like C++, and Python, porting this code to Java and learning a proprietary language like URBI is going to be a huge barrier to entry. (Especially considering that Nao teams already have a ton of work on their plates getting a new code base running). I’d have loved to participate, and we probably would have had a decent shot at winning the prize, but the potential reward isn’t really only worth it since code on the actual Nao can’t interoperate easily with the code in the Webots competition. (Since the Gyros aren’t simulated in Webots anyway, having a good walk engine in the simulator would have been difficult regardless of the requirement to use URBI.)
From a business side, this move to make it more difficult for RoboCup teams to enter is probably smart. Alderbaran is already getting money from all the RoboCup teams, so broadening their markets is probably a good thing. (i.e. It would be discouraging for new comers to get beat by all the RoboCup teams who have been doing this for longer.) Also, it hardly makes sense for Gostai to support behavioral scripting in Python or other languages like C++ (with can run a Python interpreter), since Gostai makes a living off people using their product to exactly those things.
I’m also interested to see how the rules and refereeing is going to work in the online simulation. The current world is pretty good, but out-of-bounds detection needs some work, and there is no replacement for a game-controller, as of yet. Without human-refereeing, it could become really tricky to assign pushing penalties, obstruction penalties, and most importantly ban goals scored from the center circle.