Gostai, Cyberotics and Aldebaran have announced Robostadium, which is an online simmulation league based on the rules for the Nao SPL . The league is open to anyone, and the winner gets a free Nao and a software pack with URBI and Webots PRO. I think this will be really cool, since it could draw a ton of outside interest to our league.
I’d heard about this idea a while ago, and I was worried that only the established RoboCup teams would have a fighting chance, since walking is so difficult, but now I think there won’t be any or at least very few RoboCup teams participating:
The competitors will have to program a team of 4 Nao robots using the URBI middleware and the Java programming language.
Since most teams have considerable code infrastructure of their own in laguages like C++, and Python, porting this code to Java and learning a proprietary language like URBI is going to be a huge barrier to entry. (Especially considering that Nao teams already have a ton of work on their plates getting a new code base running). I’d have loved to participate, and we probably would have had a decent shot at winning the prize, but the potential reward isn’t really only worth it since code on the actual Nao can’t interoperate easily with the code in the Webots competition. (Since the Gyros aren’t simulated in Webots anyway, having a good walk engine in the simulator would have been difficult regardless of the requirement to use URBI.)
From a business side, this move to make it more difficult for RoboCup teams to enter is probably smart. Alderbaran is already getting money from all the RoboCup teams, so broadening their markets is probably a good thing. (i.e. It would be discouraging for new comers to get beat by all the RoboCup teams who have been doing this for longer.) Also, it hardly makes sense for Gostai to support behavioral scripting in Python or other languages like C++ (with can run a Python interpreter), since Gostai makes a living off people using their product to exactly those things.
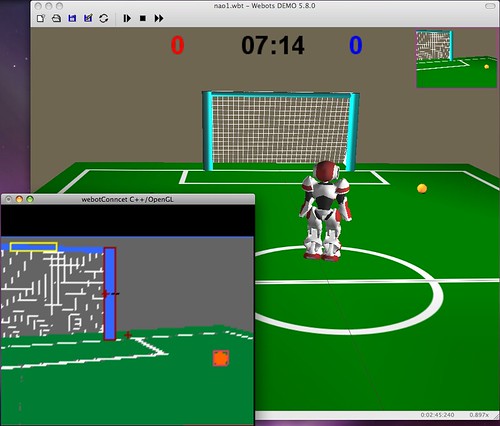
I’m also interested to see how the rules and refereeing is going to work in the online simulation. The current world is pretty good, but out-of-bounds detection needs some work, and there is no replacement for a game-controller, as of yet. Without human-refereeing, it could become really tricky to assign pushing penalties, obstruction penalties, and most importantly ban goals scored from the center circle.